Como programar el robot Makeblock con mBlock
Antes de nada lo que necesitáis para empezar a utilizar el mBot o cualquier robot de Makeblock, es tener instalado el mBlock.
Podéis pasaros por nuestro tutorial de iniciación a mBlock.
Programar el robot mBot con mBlock
Para poder empezar a trabajar con el robot tenemos que seguir una serie de pasos. Primero tenemos que instalar el driver necesario para poder conectar el robot a nuestro pc.
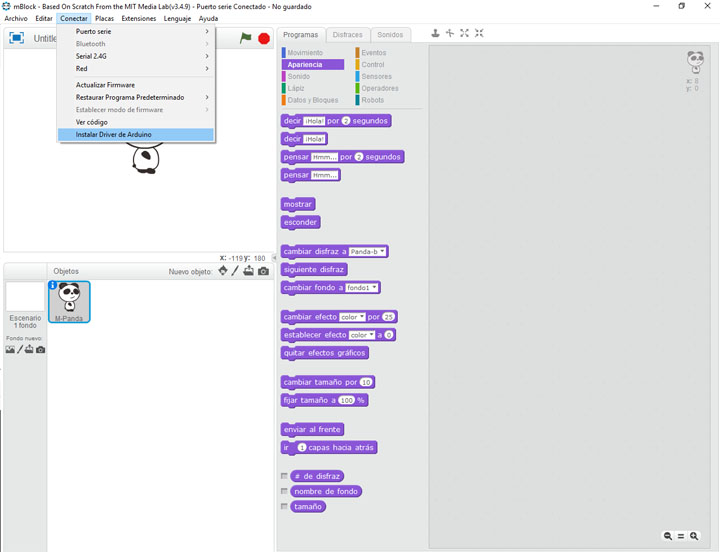
Instalar el driver de Arduino en MakeBlock
Para instalar el driver necesario vamos a mBlock y en conectar seleccionamos driver de Arduino, nos aparecera un asistente y solo tenemos que seguir sus instrucciones.
Como conectamos el robot de Makeblock
El robot que vamos a usar para las pruebas es el mBot de Makeblock, aquí tenéis las instrucciones de montaje, pero podéis usar el Ranger o cualquier otro robot compatible con Arduino
Para conectar este modelo con el mBlock lo más fácil es utilizar el cable usb, aunque podríamos hacerlo también con bluetooth.
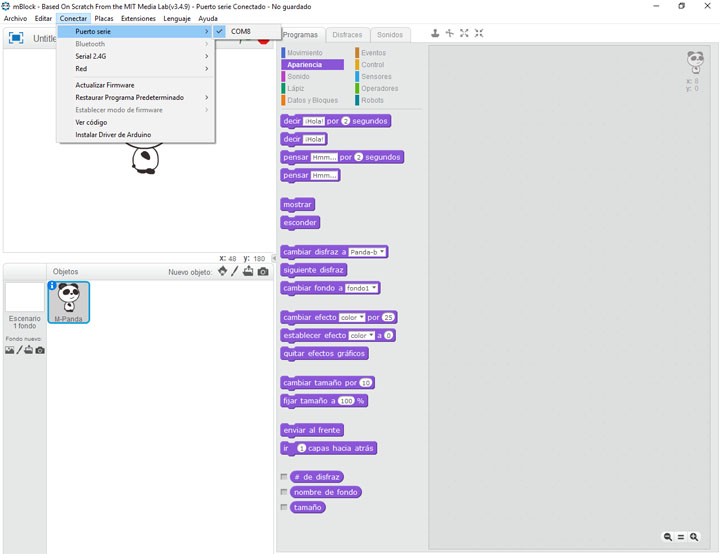
- Conectamos el cable usb al ordenador y al robot.
- Encendemos el robot con el botón de power.
- Seleccionamos en mBlock Conectar -> Puerto serie -> Com + un número que en mi caso es Com8
Una vez realizada la conexión entre el robot y el pc, tenemos que indicarle a mBlock que tipo de robot tenemos, ya que puede servir para diferentes modelos.
En nuestro caso deberíamos seleccionar mbot.

Actualizar el software del mBot
Para asegurarnos que el robot educativo trae las últimas actualizaciones lo que podemos hacer es actualizar su software. Esta operación la podemos hacer desde el propio mBlock,
Primer programa para mi robot
Como ya hemos comentado antes mBlock es un entorno de programación basado en Scrach por lo que cuenta con todas las funcionalidades propias de ese entorno y con todos sus bloques y comandos.
A nosotros las funciones que nos van a interesar son las que están relacionadas con los Robots y su control. Esas las tenemos todas en las secciones Robots, Control, Operadores y Sensores.
Por ejemplo podemos hacer un programa muy sencillo que sea decirle al robot que avance a una velocidad de 255 durante 6 segundos, que pare durante 2 segundos y que retroceda sin girar a menos velocidad durante 6 segundos y se vuelva a parar.
Para crear este programa tenemos que utilizar bloques de las sección de control, además de los de la sección robots.
Grabar el programa de mblock en el robot
Una vez que hemos creado el programa, tenemos que grabarlo en el robot. Para poder pasarlo al robot tenemos que poner el mblock en modo arduino, para ello vamos a editar -> modo arduino
Cuando seleccionamos este modo el aspecto de entorno de desarrollo cambia un poco, podemos ver el lenguaje que se ha generado al añadir los bloques, podemos revisarlo un poco si somos curiosos pero no es necesario.
Una vez en el modo arduino, nos aseguramos que el robot está conectado al ordenador y encendido, si es así para pasarlo al robot solo tenemos que pulsar el botón subir a Arduino.
Ya solo nos queda probrar el programa…aquí os dejo el resultado, seguiremos haciendo más pruebas.
Resumen del tutorial
En este tutorial hemos aprendido varias cosas:
- Instalar el driver de arduino para el mBot.
- Conectar el robot y actualizar el software.
- Crear y grabar el primer programa.
Si quieres puedes seguir revisando más cursos y talleres de robótica educativa.
[mc4wp_form id=»130″]
{kind=link}